
L'objectif principal du projet DESSOPT est de rechercher des solutions pour appréhender, caractériser et optimiser un réseau de dessertes sur un massif forestier. Ce réseau est important pour la mobilisation des bois mais également la lutte contre les incendies.
A ce jour, la connaissance de la desserte forestière n’est pas égale sur tout le territoire et nécessite des moyens humains importants, tant pour l’identifier que pour la caractériser. La récente mise à disposition d’une donnée LiDAR Haute Densité (HD) par l’IGN, sur la France entière, laisse présager des possibilités dans la détection fine et dans la caractérisation de la desserte forestière et ce de manière automatisée.
L’IGN a initié des travaux, dès 2015, pour répondre à ces besoins. De nouvelles approches, plus opérationnelles, sont à développer et viseraient, en plus de la cartographie de la desserte, à en déterminer une largeur voire son état.
Par ailleurs, l’outil Sylvaccess, développé par l’INRAE, vise à cartographier l’accessibilité de la ressource en fonction de plusieurs sources d’informations spatiales et de paramètres techniques. Cet outil permet une optimisation du tracé des dessertes, mais demande à être mis à jour. Il nécessite en effet quelques adaptations pour prendre en considération la dimension foncière de la forêt privée.
Le CNPF-IDF porte et anime le projet, tant sur le volet administratif que sur le volet technique, avec notamment la création du jeu de données de référence et la réflexion autour du modèle de détection des dessertes.
- Financeur : Ministère de l'Agriculture et de la Souveraineté alimentaire et de la Forêt
- Durée : 24 mois
- Date de début de projet : 1er décembre 2024
- Partenaires : ONF, IGN et INRAe
- Chef de projet CNPF : Michel Chartier

1ère phase du projet
Actuellement, les prises de mesure terrain sur desserte ou sur placette s’effectuent majoritairement au moyen de GPS basique, d’une tablette ou d’un smartphone. Néanmoins, la précision réelle de ces outils est faible, avec des écarts par rapport à des points pris au GPS haute précision RTK très importants, pluri-métriques.
La BD Topo éditée par l’IGN et décrivant les éléments du territoire, tels que le réseau routier, présente une précision annoncée métrique, mais pouvant dévier fortement par rapport aux données LiDAR HD nouvellement produite.
Ces deux types de données à disposition ne peuvent donc pas être utilisés dans le cadre d’une modélisation. Il apparaît alors nécessaire de constituer un jeu de données de références, homogène sur tout le territoire.
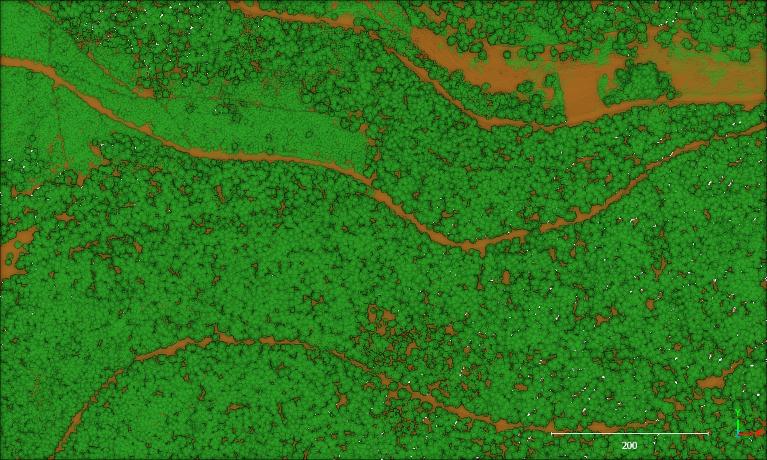
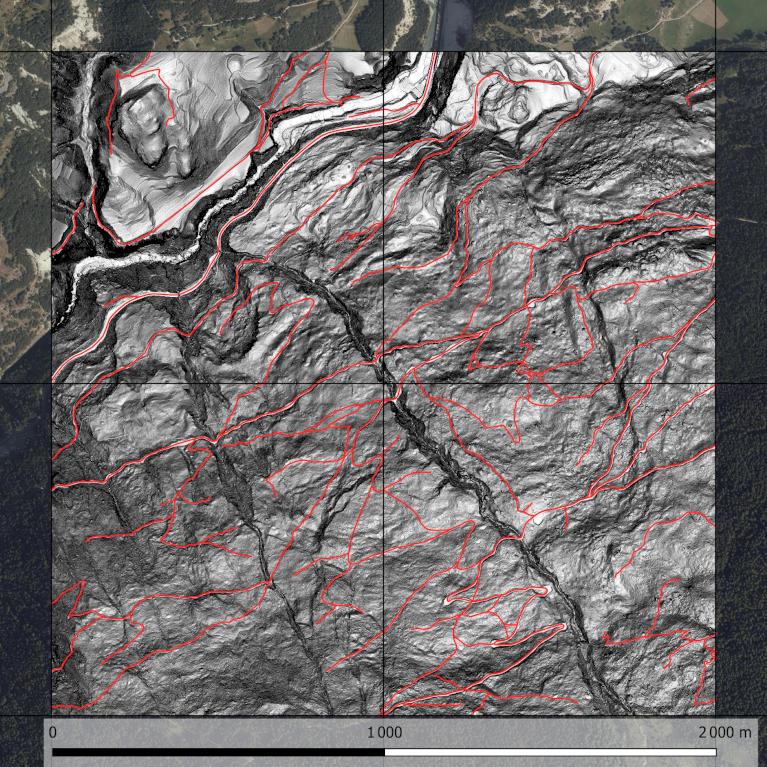
La 1ère étape du projet est donc une étape de digitalisation des dessertes à partir des données issues du LiDAR HD (Figure 2).
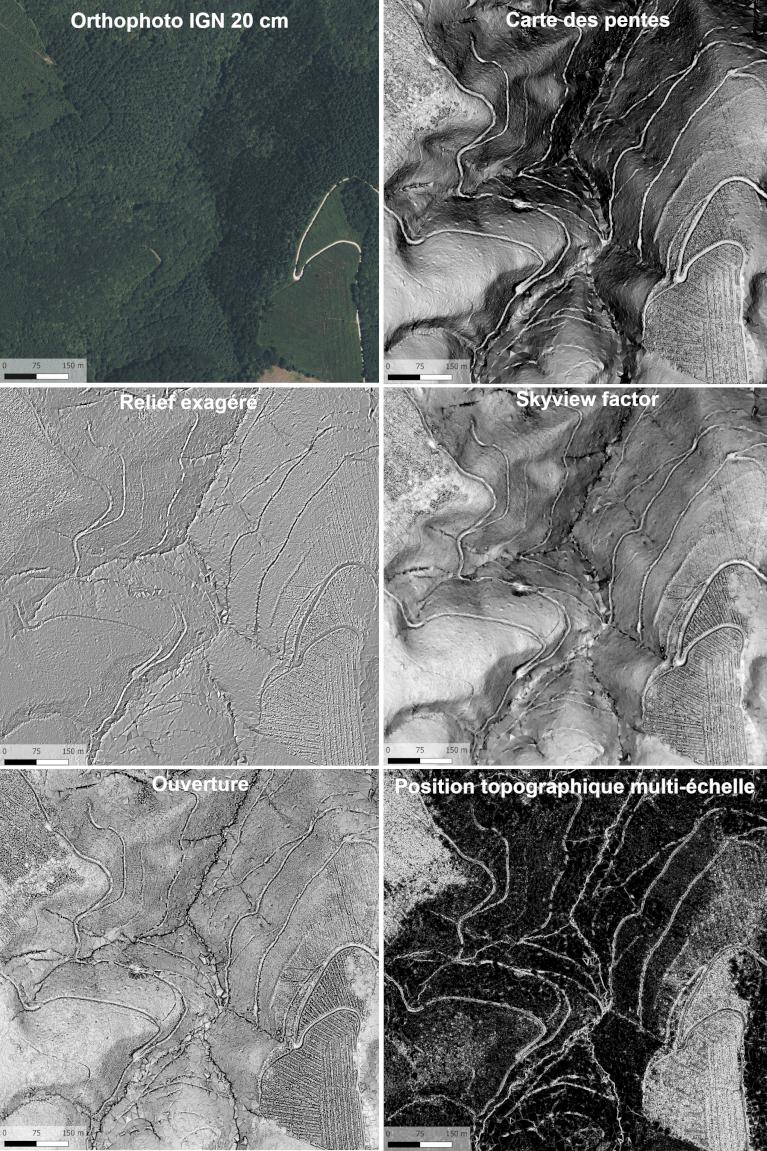
Les nuages de points sont convertis en Modèle Numérique de Terrain (classe de points sols uniquement), puis des dérivés y sont extraits, comme la pente, le relief exagéré, etc. (Figure 3). Ces différentes couches permettent de visualiser distinctement les tracés de route, parfois invisibles depuis une image aérienne car recouvert d’une couverture dense.
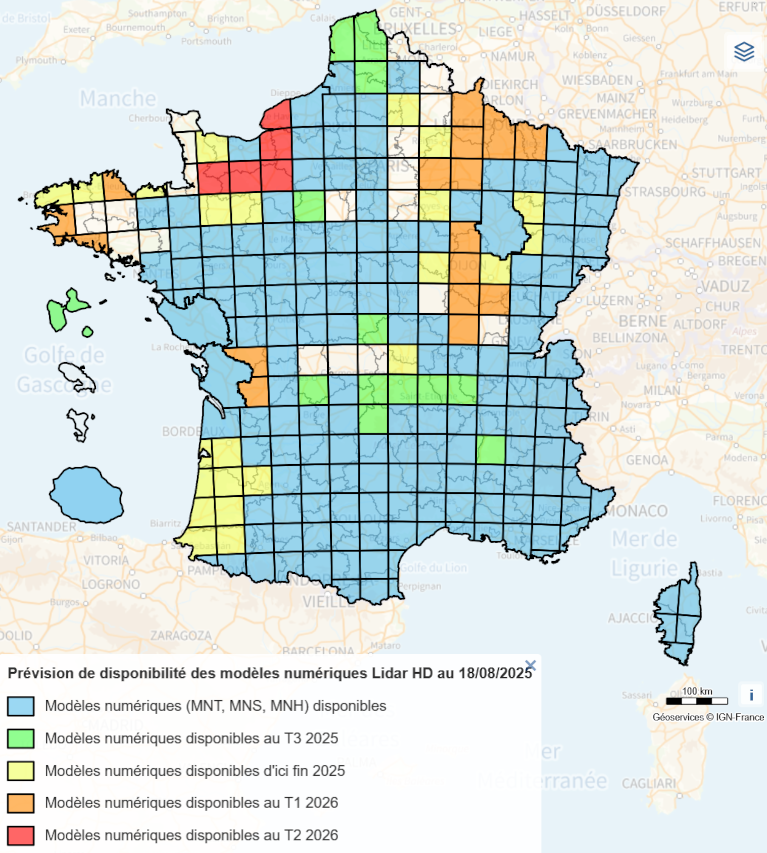
Les acquisitions LiDAR du programme LiDAR HD de l’IGN sont en cours de finalisation, le programme ayant débuté en 2021 (Figure 4).
Les nuages de points, ainsi que les modèles numériques de terrain, de surface et de hauteur, sont disponibles sur le site internet du programme.
2ème phase du projet
Le jeu de données de référence créé, il alimentera dans un second temps le modèle de détection des dessertes en utilisant toujours les dérivés du nuage de points LiDAR HD. L’idée consiste à tirer parti de plusieurs indicateurs afin d’établir une carte de conductivité exposant les tracés de dessertes, et d’appliquer un modèle permettant de les détecter.
3ème phase du projet
Une fois le modèle mis au point et la chaîne de traitement des données LiDAR HD produite, il s’agira de l’implémenter sur la plateforme Computree afin de permettre une diffusion open source et la possibilité de créer sa carte des dessertes sur le secteur souhaité.
Parallèlement, des réflexions seront menées autour de l’outil Sylvaccess afin d’améliorer le réseau de desserte en y intégrant par exemple le foncier, afin d’optimiser les itinéraires.